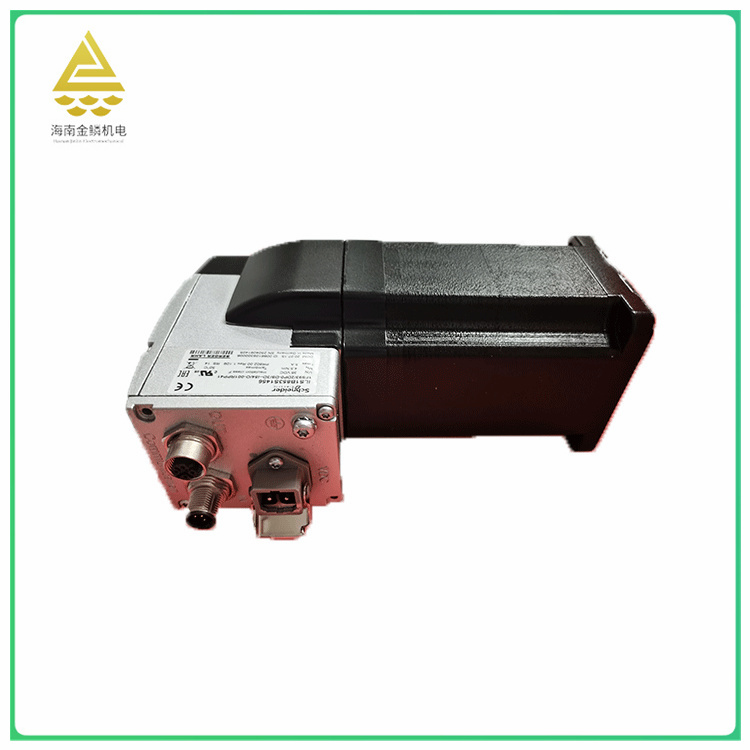
The ILS1B853S1456 is an integrated drive from Schneider Electric that is typically used to control motors and actuators for precise control of mechanical systems. The following is a detailed introduction to ILS1B853S1456:
Application field:
Industrial automation: Used in industrial automation systems, including production line control, process control and machine automation.
Motion control system: widely used in motion control systems, such as CNC machine tools, robots, printing presses, etc., to achieve high-precision position and speed control.
Manufacturing: Used to control various production equipment, including conveyor belts, workbenches, assembly lines, etc.
Wind and solar: Used to control wind turbines and solar tracking systems for optimal control of energy generation.
Building automation: applied to building automation systems, such as elevators, ventilation systems, air conditioning systems, etc., to achieve accurate control of building equipment.
Water treatment and treatment equipment: used to control pumps, valves and other equipment to ensure the efficient operation of the water treatment process.
Traffic system: Used to control electric vehicles, elevators, escalators, etc., to provide reliable transportation services.
Functional features:
The scan period of the smart bus is 5ms. When the host of the primary unit is powered off, the smart bus controller in the expansion unit waits 400ms and stops updating the output of the smart device. After another 15ms, the smart device uses the data in the backup unit as output.
For wireless full mesh self-configuration, combined with Paradox Engineering's AMI PLC nodes, for the control and management of smart lighting and smart city infrastructure.
As a servo motor driver, it can control the speed and position of the motor, with high precision control ability, and can convert the voltage signal into torque and speed to drive the control object.